面向通用機器人的基礎模型 綜述與基礎軟件開發綜合分析
隨著人工智能技術的飛速發展,通用機器人已成為科技領域的熱點研究方向。基礎模型作為支撐機器人智能化的核心技術,正逐步推動機器人從單一任務執行向多場景、自適應交互的轉變。本文對面向通用機器人的基礎模型進行綜述,并對其基礎軟件開發進行綜合分析,旨在為相關研究和實踐提供參考。
一、通用機器人與基礎模型的融合背景
通用機器人旨在模擬人類在復雜環境中的感知、決策與行動能力,其核心挑戰在于處理多樣化的任務和不確定的環境。基礎模型,如大語言模型(LLMs)和視覺-語言模型(VLMs),通過預訓練和大規模數據學習,為機器人提供了強大的語義理解、推理和生成能力。例如,GPT系列和CLIP等模型已被應用于機器人任務規劃、自然語言交互和視覺導航中,顯著提升了機器人的通用性和適應性。
二、基礎模型在通用機器人中的關鍵應用
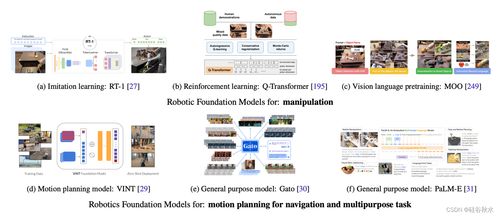
- 任務規劃與決策:基礎模型能夠解析自然語言指令,生成可執行的機器人動作序列。例如,結合強化學習,機器人可以動態調整策略以應對突發情況。
- 環境感知與交互:通過視覺-語言模型,機器人能夠識別物體、理解場景上下文,并與人類進行自然對話。這在服務機器人和工業自動化中具有廣泛應用。
- 仿真與遷移學習:基礎模型支持虛擬環境中的仿真訓練,加速機器人技能的遷移到現實世界,降低開發成本。
三、基礎軟件開發的關鍵要素與挑戰
基礎軟件開發是通用機器人實現落地的核心環節,涉及以下方面:
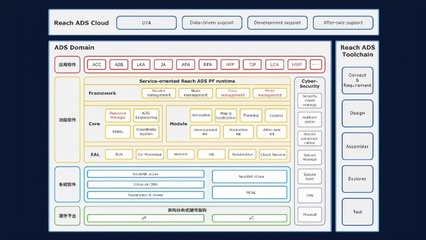
- 模塊化架構設計:軟件需采用分層架構,如感知層、決策層和執行層,確保各模塊可獨立升級和集成。ROS(機器人操作系統)是常見框架,但需適配基礎模型的高計算需求。
- 數據管理與預處理:基礎模型依賴大規模多模態數據,軟件開發需包含高效的數據采集、標注和增強工具,以提升模型魯棒性。
- 實時性與安全性:機器人軟件必須保證低延遲響應和故障容錯,尤其在安全關鍵場景(如醫療或自動駕駛)中,需集成驗證和監控機制。
- 開源生態與標準化:社區驅動的開源項目(如PyRobot或NVIDIA Isaac)促進了工具共享,但標準化接口和協議仍需完善,以解決兼容性問題。
四、未來趨勢與展望
未來,面向通用機器人的基礎模型將更注重多模態融合、小樣本學習和能源效率。基礎軟件開發需向云-邊協同和自適應學習演進,同時加強倫理與隱私保護。隨著5G和邊緣計算的發展,機器人有望在家庭、醫療和工業領域實現更廣泛的普及。
基礎模型為通用機器人注入了強大的智能潛力,而基礎軟件開發是確保其可靠部署的關鍵。通過跨學科合作和技術迭代,我們正邁向一個高度自主的機器人時代。
如若轉載,請注明出處:http://www.marcopolofoshan.cn/product/20.html
更新時間:2026-01-09 20:20:56